Research Projects
Intraocular Robotic Interventional and Surgical System (IRISS) for Cataract Surgery

The IRISS is the result of research collaboration between the Mechatronics and Control Laboratory and the Stein Eye Institute. The research vision is to develop a surgical platform capable of performing anterior and posterior ocular surgical procedures via teleoperation and automation
The IRISS has the unique capability to simultaneously manipulate two surgical instruments through ocular incisions spaced millimeters apart. The large range of motion of the manipulator allows for both anterior and posterior surgical instrument positioning. To facilitate comprehensive surgical procedures, the IRISS can automatically alternate between multiple surgical instruments on each arm. Dedicated master surgical manipulators and microscope-mounted cameras allow for three-dimensional visualization of the surgical field for guiding teleoperated procedures.
Through NIH R21 research support, an optical coherence tomography (OCT) system was integrated into the IRISS platform and the extracted images used for preoperative planning and intraoperative intervention in a series of automated procedures. Real-time intervention allowed surgeons to evaluate the progress and override the operation. The developed system was validated by performing lens extraction on 30 post-mortem pig eyes. The IRISS successfully demonstrated semi-automated OCT-guided lens removal with real-time supervision and intervention.
IRISS for Cataract Surgery: Automated Cataract Removal
IRISS for Cataract Surgery: System Integration
Intraocular Robotic Interventional and Surgical System (IRISS) for Vitreoretinal Procedures
The overall aim of this research is to augment the IRISS system for teleoperated vitreoretinal surgery. The surgical cockpit of the Raven II, an open-source surgical robotics systems co-developed by our group, will serve as the foundation of the user interface for the improved robotic surgical system.
The effort is composed of three independent, parallel tracks. First, the mechanical design and assembly of the robotic surgical system is being improved to achieve tool-tip positional precision of 5 µm, approximately ten times more precise than a human surgeon. Second, we are enhancing the surgeon's abilities in sensing and interpreting anatomical details during retinal manipulation by applying high-resolution (10 µm), real-time intraoperative i-OCT scans to detect anatomical features critical to specific vitreoretinal procedures. Third, surgical features of interest will be presented to the surgeon via a human–robot surgical cockpit that provides innovative 3D, augmented-reality visualization and auditory and haptic feedback.
We hypothesize that a surgeon–robot surgical system that incorporates enhanced sensing and feedback to enrich the surgeon's perception and interpretation of anatomical details will improve surgical safety and reduce the rate of surgical complications to improve health outcomes and abate the costs associated with surgical complications.

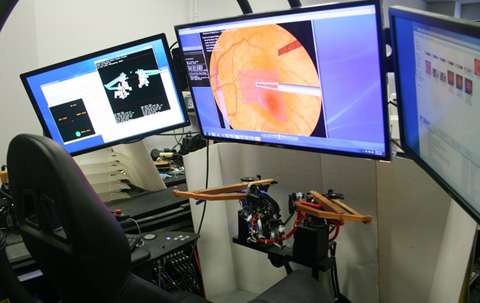
The Raven II's surgical cockpit
The human–robot surgical cockpit provides innovative 3D, augmented-reality visualization and auditory and haptic feedback during the procedure.
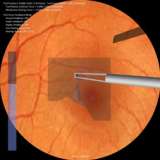
Vitroretinal surgery manipulation
The robotic surgical system is 10 times more precise that a human surgeon.